








خط إنتاج روبوت القطع بالبلازما الأوتوماتيكي

مقدمة لخط إنتاج روبوت القطع البلازمي الأوتوماتيكي
باعتباري شخصًا متحمسًا للأتمتة في التصنيع، فأنا متحمس للتعمق في الأتمتة خط إنتاج روبوت القطع بالبلازما في هذه المقالة، أحدثت هذه التقنية ثورةً في كيفية تصنيع المعادن، موفرةً دقةً وكفاءةً لا تُضاهيانها الطرق التقليدية. سأستكشف مكونات هذا النظام المتطور ومزاياه وتطبيقاته. سواءً كنتَ خبيرًا في هذا المجال أو جديدًا فيه، فإن فهم آلية عمل وفوائد خط إنتاج روبوت القطع الآلي بالبلازما يُمكن أن يُحسّن عملياتك وإنتاجيتك بشكل كبير.
ال قطع البلازما تُستخدم هذه التقنية لقطع الصفائح المعدنية ذات السُمك الأعلى (حتى 300 مم) مقارنةً بالقطع بالليزر، والذي يُستخدم للصفائح الأقل سُمكًا (حتى 15 مم). تُعد تقنية القطع بالبلازما الحل الأمثل والأكثر فعالية من حيث التكلفة لقطع المعادن السميكة.
نظام القطع بالبلازما HYPERTHERM MAXPRO200
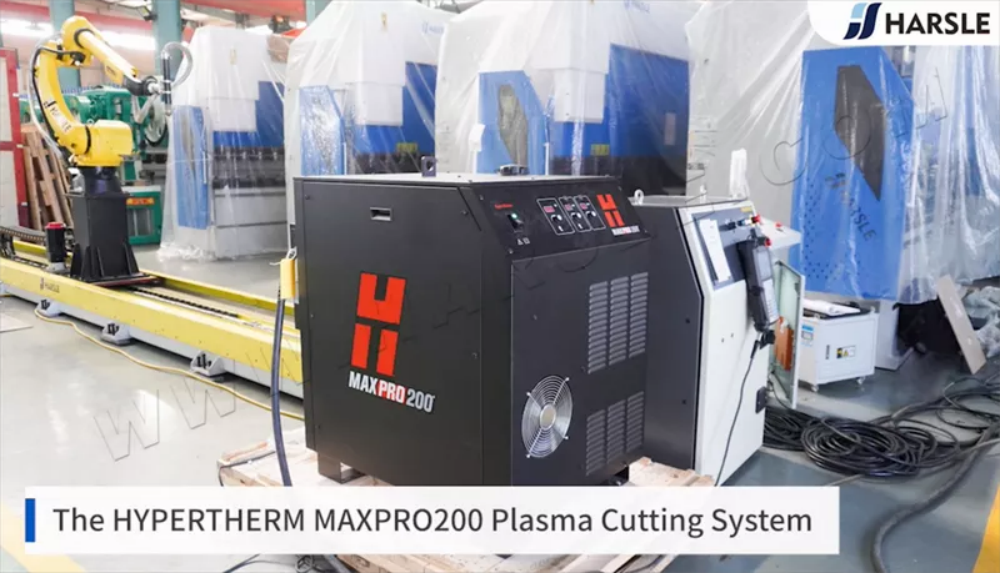
صُمم نظام القطع بالبلازما HYPERTHERM MAXPRO200 لتطبيقات القطع والحفر الثقيلة عالية القدرة، سواءً الآلية أو اليدوية. يتميز النظام بإنتاجيته العالية، وسهولة تشغيله، وانخفاض تكلفته، وموثوقيته الرائدة في هذا المجال. يمكنه اختراق الفولاذ الصلب بسمك 32 مم (1 1/4 بوصة). تُحسّن التصميمات المتطورة للمواد الاستهلاكية اتساق القطع، وتزيد من عمر المواد الاستهلاكية بشكل ملحوظ، مما يُقلل تكلفة كل قطعة. بفضل تقنية القطع True Bevel، تُصبح عمليات الإعداد للمشاريع الجديدة سريعة، وتكون النتائج دقيقة ومتسقة.
روبوت فانوك

سيوفر استخدام روبوت FANUC للعملاء مزايا تنافسية مختلفة: زيادة الإنتاجية، وتحسين موثوقية العمل، وارتفاع جودة المنتج، وخفض التكاليف، وما إلى ذلك. يتم التحكم في جسم الروبوت بواسطة 6 محاور لضمان التشغيل المرن في الإنتاج.
مسار هارسل الأرضي
مع مسار HARSLE الأرضي لتحقيق التحكم في 7 محاور لتحقيق أقصى قدر من كفاءة الإنتاج.
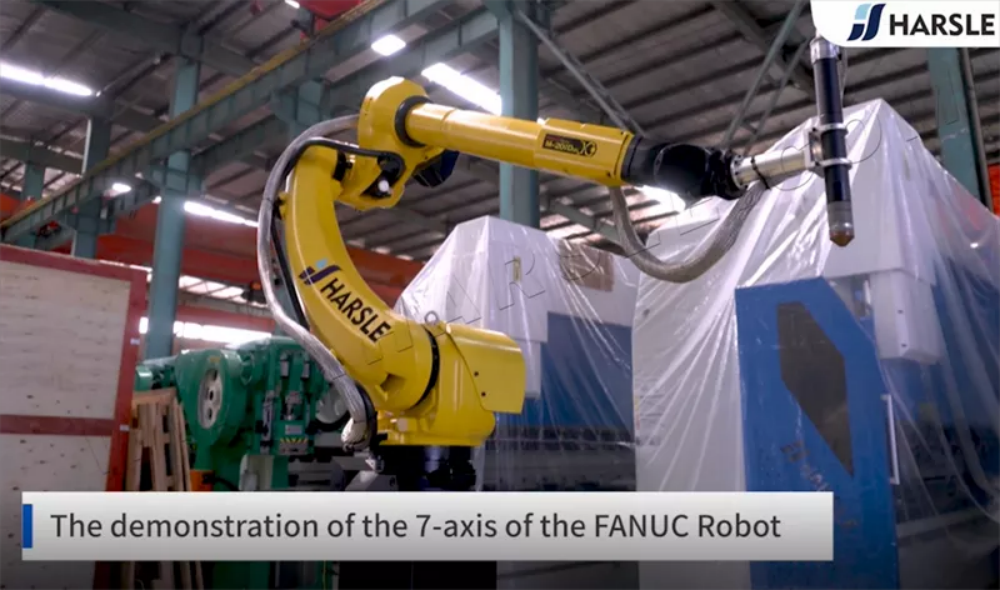
عرض توضيحي للمحور السابع لروبوت FANUC

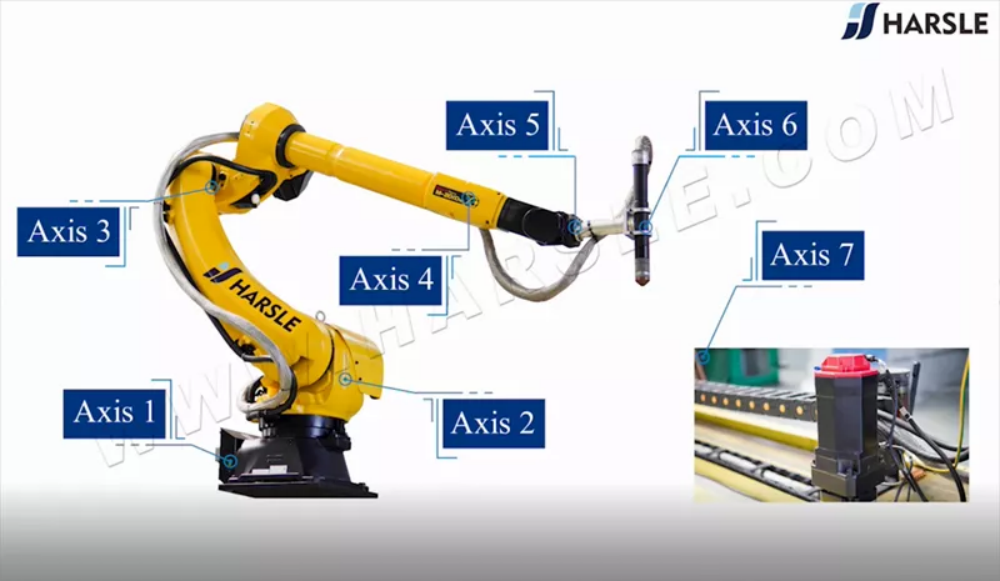
الروبوت المتحكم بـ 7 محاور يعني أنه يمكنه الدوران أو التحرك على 7 محاور مختلفة.

المحور ١، الموجود عند قاعدة الروبوت، يسمح له بالدوران من اليسار إلى اليمين. هذه الحركة الشاملة تُوسّع مساحة العمل لتشمل المنطقة على كلا الجانبين وخلف الذراع. يسمح هذا المحور للروبوت بالدوران بزاوية ١٨٠ درجة كاملة من نقطة المركز. يُشار إليه بالرمز J1.

المحور ٢، يسمح هذا المحور للذراع السفلية للروبوت بالتمدد للأمام والخلف. وهو المحور الذي يُحرك الذراع السفلية بأكملها. يُرمز له بالرمز J2.

المحور 3، يُوسّع هذا المحور مدى وصول الروبوت عموديًا. يسمح للذراع العلوية بالرفع والخفض. في بعض الطُرز المفصلية، يسمح للذراع العلوية بالوصول خلف الجسم، مما يُوسّع نطاق العمل بشكل أكبر. يُتيح هذا المحور للذراع العلوية إمكانية وصول أفضل للأجزاء. يُشار إليه بالرمز J3.

المحور 4، الذي يعمل بالتزامن مع المحور 5، يُساعد هذا المحور في تحديد موضع المُفعِّل النهائي والتحكم في القطعة. يُعرف هذا المحور باسم "لفافة المعصم"، حيث يُدير الجزء العلوي من الذراع في حركة دائرية، مُحرِّكًا القطع بين الوضع الأفقي والرأسي. يُشار إليه بالرمز J4.

المحور 5: يسمح هذا المحور لمعصم ذراع الروبوت بالميلان لأعلى ولأسفل. هذا المحور مسؤول عن حركة الميلان والانحراف. حركة الميلان، أو الانحناء، تكون لأعلى ولأسفل، مثل فتح وإغلاق غطاء صندوق. يتحرك الانحراف يمينًا ويسارًا، مثل باب بمفصلات. يُشار إليه بالرمز J5.

المحور 6 هو معصم ذراع الروبوت. وهو مسؤول عن حركة الالتواء، مما يسمح له بالدوران بحرية في حركة دائرية، سواءً لوضع المؤثرات الطرفية أو للتحكم في الأجزاء. عادةً ما يكون قادرًا على الدوران لأكثر من 360 درجة، إما مع عقارب الساعة أو عكسها. يُشار إليه بالرمز J6.

المحور ٧ هو مسار هارسل الأرضي. يتحرك جسم الروبوت بالكامل ذهابًا وإيابًا على هذا المسار، مما يزيد من مساحة عمل الروبوت.
روبوت دوار على نقطة واحدة

يعمل على تحسين جودة العمل ودقة القطع بشكل فعال.
شاشة قطع مشطوفة حقيقية


بفضل تقنية القطع True Bevel، أصبحت عمليات الإعداد للمهام الجديدة سريعة والنتائج دقيقة ومتسقة.